During my time as a graduate student at Purdue University studying Robotics, I took a core subject called ME588-Mechatronics, where I was involved in developing the Robotic Whack-A-Mole Automatic Field Steering system based on sensor navigation from January 2022 to June 2022. In this blog post, I will provide a detailed explanation of the project and my contributions to it.

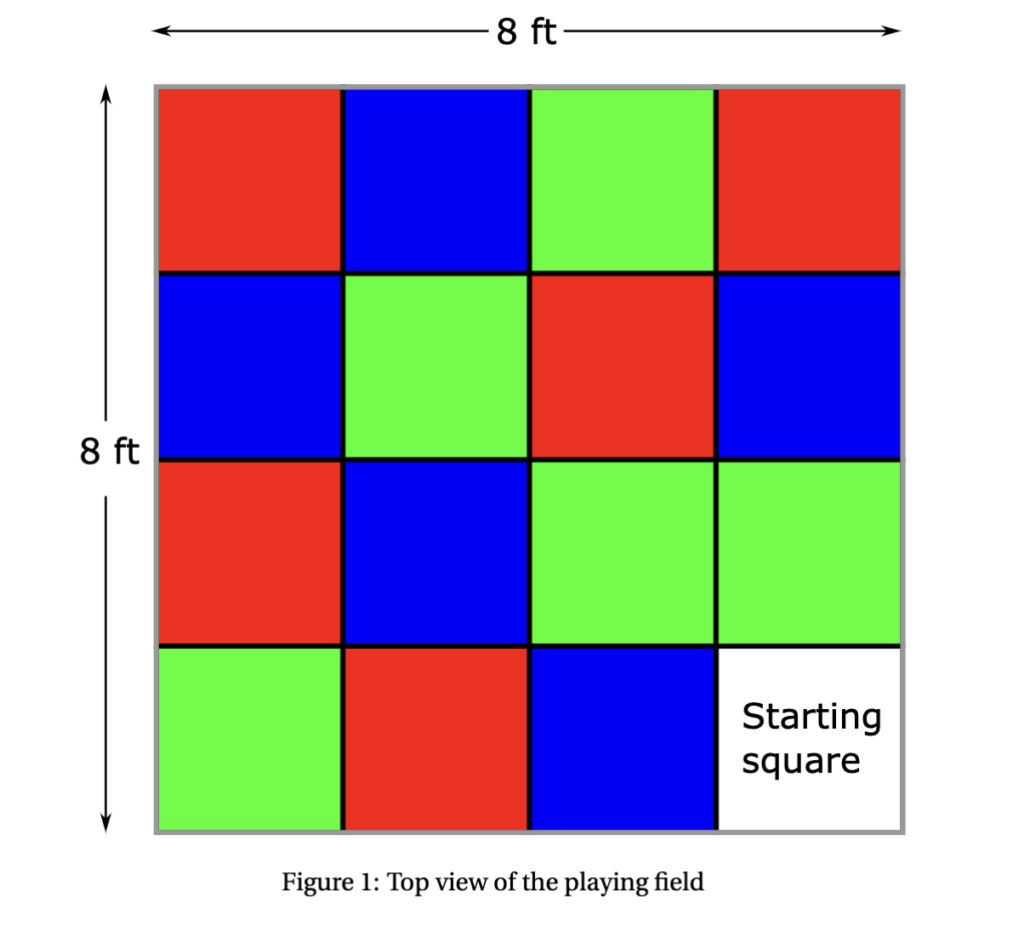
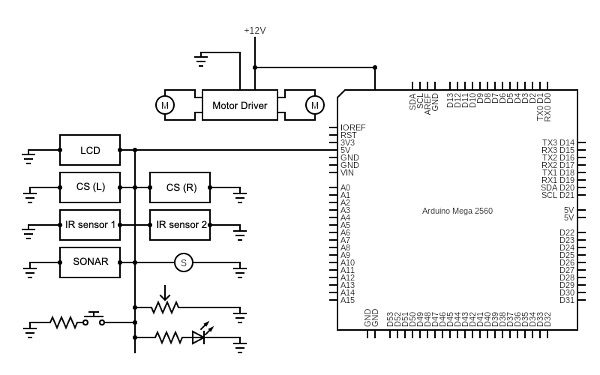
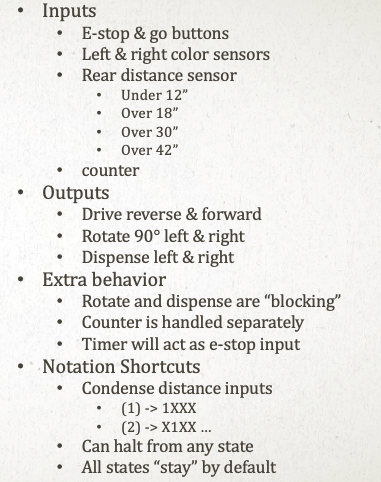
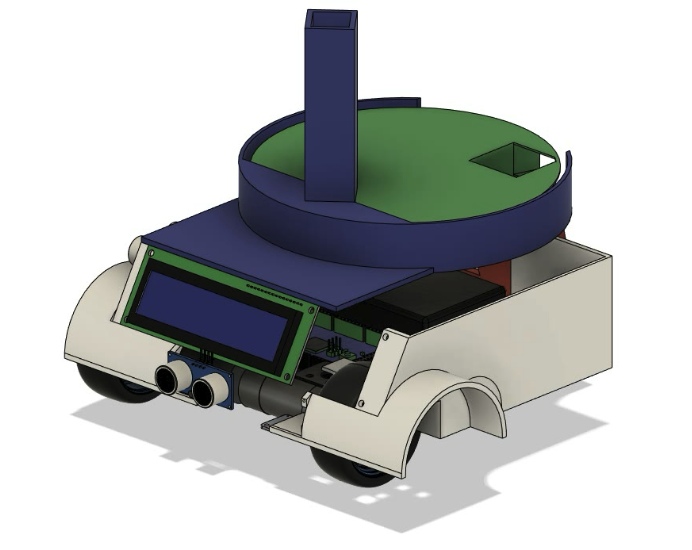
My primary role in the project was to design the construction and electric circuit of a robot to autonomously steer the playing field, which comprised of 16 2×2 foot tiles. I also developed algorithms for motion control, distance measurement using LiDAR, and color detection using sensors. These algorithms were critical to the functioning of the robot and allowed it to navigate the playing field and locate the targets.
One of the most significant challenges I faced during the project was developing algorithms that could accurately detect and locate the targets in real-time. This required me to have a deep understanding of robotics, control systems, and signal processing. To address this challenge, I worked closely with the team to refine the algorithms and improve their accuracy.
In addition to my work on the robot’s construction and algorithms, I also developed a strong understanding of sensor navigation, which was a critical component of the project. Specifically, I worked on developing algorithms for color detection and distance measurement using sensors, which were crucial to the robot’s navigation.
Throughout the project, I developed several key skills, including problem-solving, critical thinking, and collaboration. I learned the importance of effective communication and how to work effectively as part of a team.
- Writing algorithms for motion control, color detection, and intelligence of the robot to do the required actions
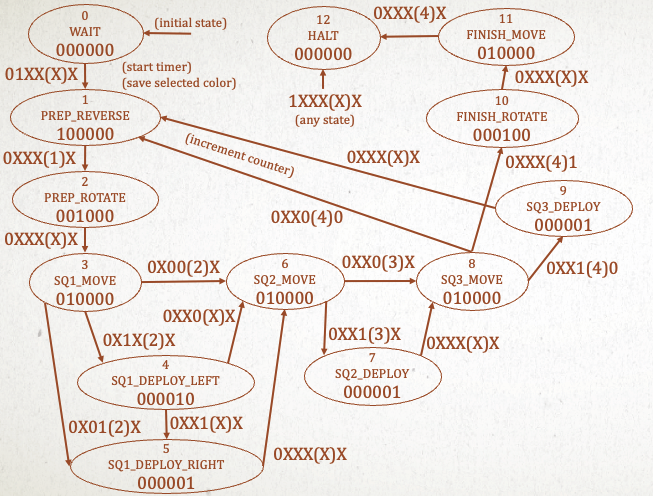
Logic Diagram:
3D-Renders (CAD Model)
In conclusion, my work on the Robotic Whack-A-Mole Automatic Field Steering system based on sensor navigation at (company name) allowed me to make significant contributions to a complex robotics project. By designing the construction and electric circuit of the robot and developing algorithms for motion control, distance measurement, and color detection using sensors, I was able to develop and apply key skills that are valuable to any software engineering role. I am proud of the work that I accomplished during my tenure, and I look forward to leveraging my skills and experience to tackle new challenges in the future.