During my time at Purdue University, I had the opportunity to study a sought-after course in Robotics at Purdue – ME597 Autonomous Systems.
where I was involved in developing an autonomous vehicle and SLAM in ROS and Gazebo from January 2022 to June 2022. In this blog post, I would like to provide a detailed explanation of the project and my contributions to it.
My role in the project was to develop algorithms for optimal control of the autonomous vehicle. This involved the development of time-based optimal control, line follower, object tracking, and PID algorithms to move the vehicle. I wrote these algorithms in rospy (ROS), a popular Python library for ROS. This required me to have a strong understanding of robotics, control theory, and algorithms.
One of the most significant challenges I faced during the project was achieving the desired level of precision in the vehicle’s movements. To address this challenge, I worked closely with the team to refine the algorithms and improve their accuracy.
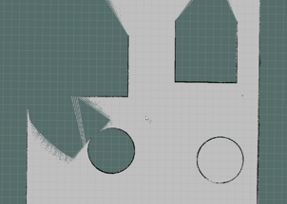
In addition to my work on the vehicle’s movement algorithms, I also worked on the perception of the vehicle. Specifically, I developed a ball detection and tracking code to run Gazebo Simulation translated to SLAM (Simultaneous Localization and Mapping). This required me to develop expertise in computer vision, as well as familiarity with Gazebo Simulation.
Throughout the project, I developed several key skills, including problem-solving, critical thinking, and collaboration. I learned the importance of effective communication and how to work effectively as part of a team.
In conclusion, my work on the autonomous vehicle and SLAM project at (company name) allowed me to make significant contributions to a complex robotics project. By developing algorithms for optimal control of the vehicle and perception of the environment, I was able to develop and apply key skills that are valuable to any software engineering role. I am proud of the work that I accomplished during my tenure, and I look forward to leveraging my skills and experience to tackle new challenges in the future.